Triangle Embedded Interest Group (TriEmbed) is an informal Triangle, NC (Raleigh/Durham/Chapel Hill/Cary/Apex/etc) area group of people sharing interests in embedded computer/controller systems. This includes hobby-oriented single board computer systems such as ESP32, Arduino, Raspberry Pi, and others, as well as full custom electronics aimed at hobby or business venture activities.
Meeting attendees span the full range from beginners to seasoned professionals. Every meeting is intended to provide a welcoming environment for enthusiasts at any level. The meeting format varies from mostly formal presentations to mostly sitting around discussing topics of interest.
For more information about our meetings and email list, follow the links in the header menu.
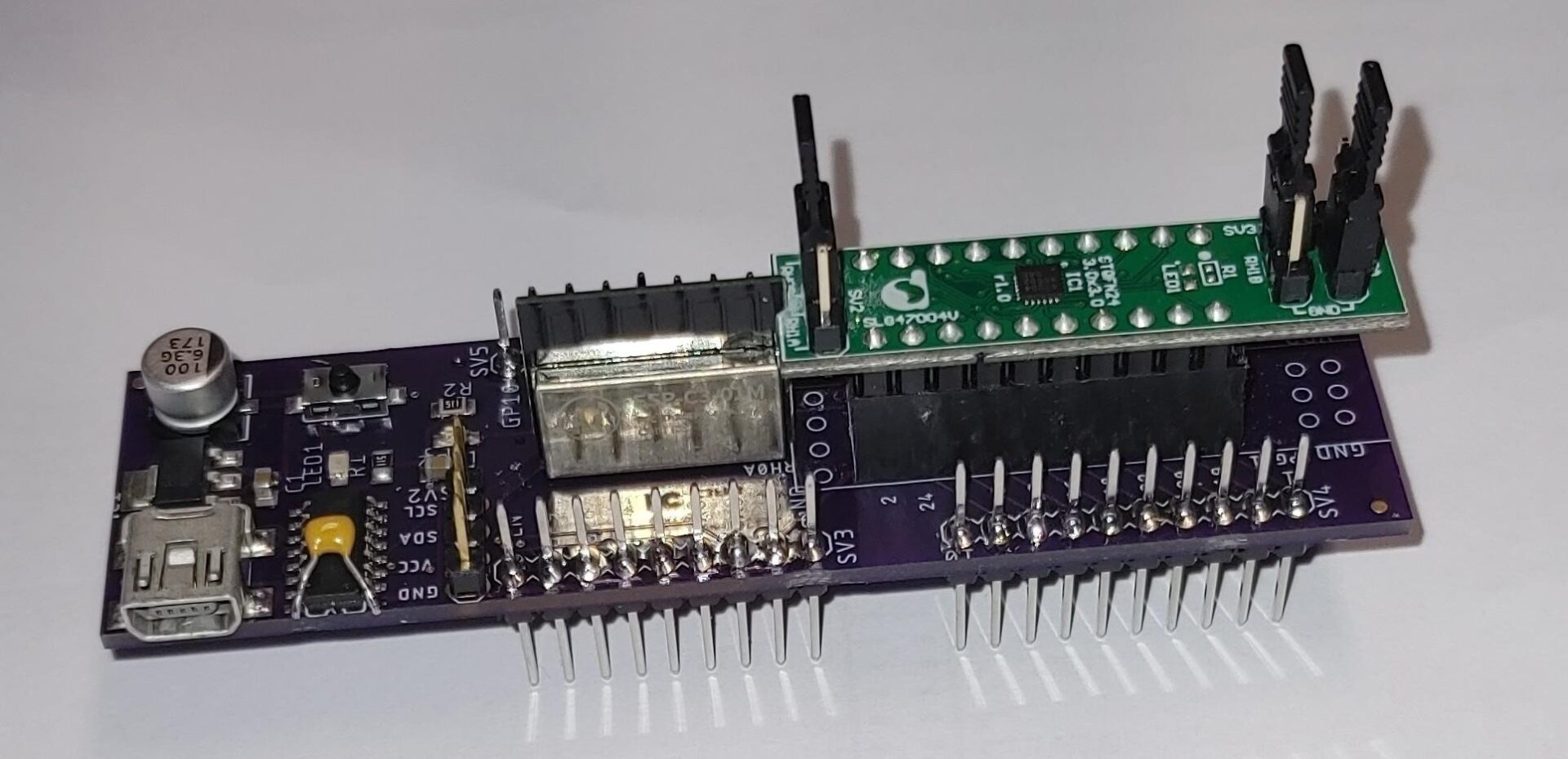
ESP32C3+Dialog Mixed Signal FPGA DIP or SMD adapter board
On Wednesday, 6/29/22 at 6:30pm at the Forge Initiative, 2172 N Salem St Suite 001, Apex, NC 27523 there will be another meeting of the TriEmbed comunity project to create and use development tools coupling ESP32 microcontrollers with Dialog mixed signal Field Programmable Gate Arrays (FPGAs).
Best to park on the street or in front of an adjacent building if possible so that folks who find the hill hard to walk can park in front of the door.
This will follow up from last month’s “installathon” format to refine tool chain installation and get as many people as possible up and running while turning attention to the Dialog Synthesis tool and creating and running some simple FPGA applications. There will also be demos of things around the corner and related technology (Aaardvark has a graphing function now!) A lot of work has gone into the project (special thanks to alpha testers Jaime Johnsen, Rob Mackie and Dawn Trembath and note taker Glen Smith). Bring your laptop (currently best support is for Linux followed by Windows Subsystem for Linux (WSL) but raw Windows will succeed with extra work and Docker images are in the works to take the sweat out. An ESP32 dev board is highly desirable but there will be a few spares at the meeting. The meeting will be facilitated by the usual suspects Rob Mackie, Nick Edgington and Pete Soper and is scheduled to end at 9pm.
The daily infection rate in Wake county is currently 433 per day and there will be high risk people at the meeting. Please wear a mask (available at the meeting). There will be an ice chest with some soft drinks to enjoy outside but you’re invited to bring your favorite.
The normal meeting format will be followed (welcome new attendees, announcements, problem/design review of the month, presentation, community project status, show and tell). This month’s presentation will be by Nick Edgington of Edgington Labs. Nick will share details of a very inexpensive line of mixed signal FPGAs (initial breakout board coming from OSH Park). Additional meeting time will be devoted to the status of the TriEmbed Community “Espressif 32 bit processor board + FPGA(s)” development board project.
I started having issues with my drip irrigation controller. It failed to turn off the other day. Luckily I caught it within a half hour, so things did not get too wet.
I have done some debugging and have isolated the issue to a digitalRead(14) line in my sketch that glitches with an unexpected value. This pin is enabled as an INPUT_PULLUP pin (internal pullup enabled) and is connected to a micro switch inside of the valve that controls the water. The switch detects whether the valve is open or closed. You can see why getting the wrong answer here would be problematic.
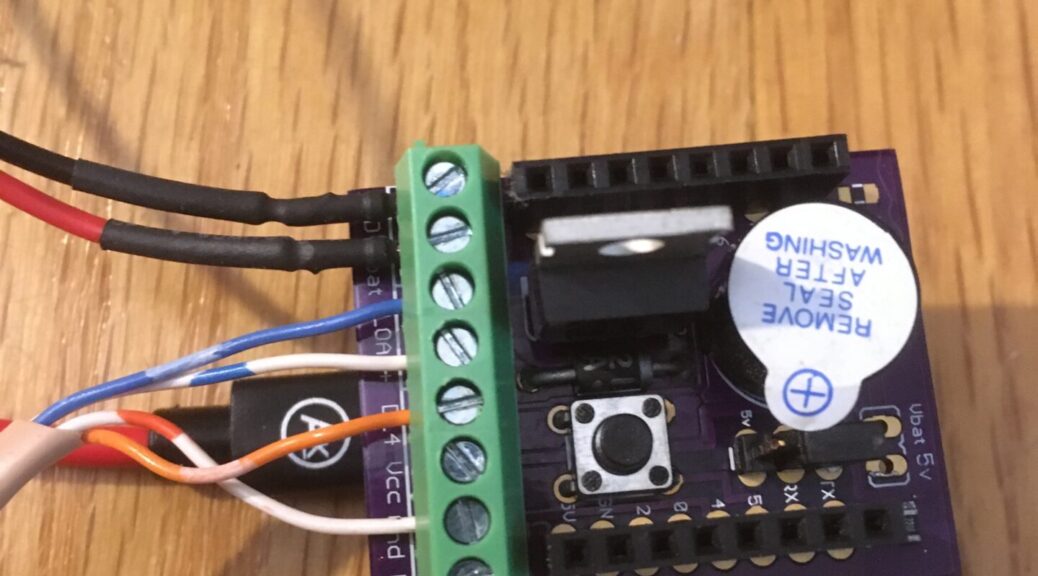
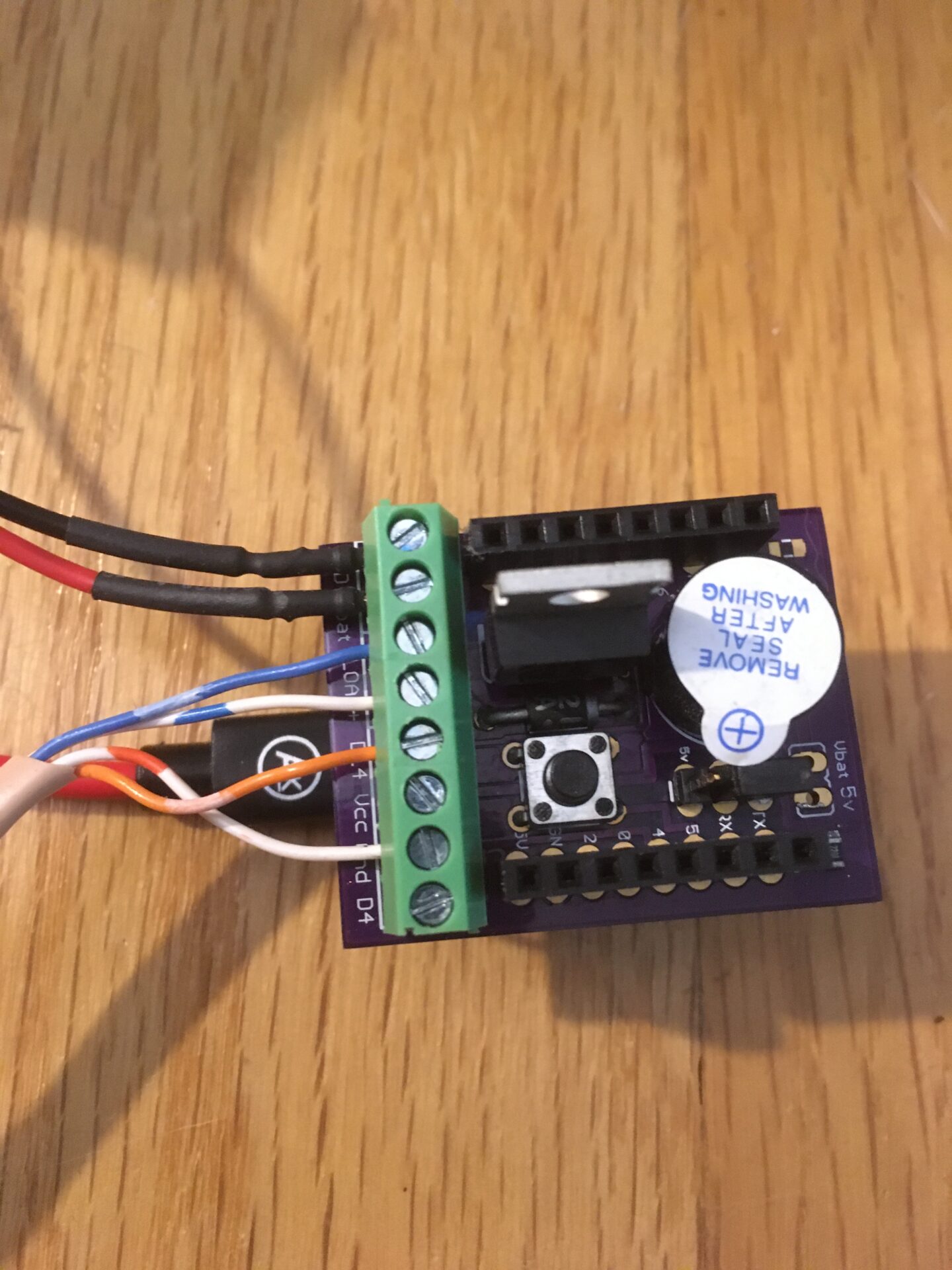
Additional HW details. I am using a D1 mini lite board (ESP8266 based). The D14 pin connects to a custom built shield which routes that signal to a screw terminal. From the screw terminal, the orange wire travels about 2 meters to the valve where it attaches to one contact of the switch. The other contact is attached to the white/orange wire which goes back to the screw terminal on the shield to ground. So, this switch grounds the D14 pin when it closes and allows it to float when open. The wire is some CAT3 telephone wire with orange and white/orange twisted together beside blue and white/blue twisted pair. There is no shielding wrap. The blue pair provides voltage (~3v from two D batteries) and ground to a DC motor in the valve to open/close the valve. The shield contains an N-mosfet to turn the DC motor on/off. I turn the MOSFET on via the ESP8266 and monitor the switch. The expectation is that the switch should turn on/off every 2-3 seconds as the valve rotates.
Here is some output from the sketch showing the valve working properly:
millis is the milliseconds since the ESP8266 booted. Elaps is the delta between consecutive millis lines. b4 is the old value of D14 and now is the new value. lowcnt is the number of times the signal was sampled low, while hicnt is the number of times the signal was sampled high. We can use the valve counter at the far right to talk about specific lines in the table. Valve count 68 shows a typical high to low transition. For 51929 samples, the signal was high. Then, it went low. We could draw this as: ———————–…———————|_ My software detects this falling edge and signals a transition. Valve 69 shows a typical low to high transition. Following the high to low transition detected by Valve 68, there is a debounce period (3 ms) during which we log, but ignore all values. During this period, there were 10 high values recorded (11 minus the one that we acted upon at the end) and an unknown number of low values. In total, there were 26975 low values and 11 high values. We could draw this as: XXX_______________…__________________________|- This switch rarely bounces on the transition from low to high and does bounce for about 500us on the high to low transition (see scope shots below).
Q1: Why are there roughly twice as many samples recorded while the switch is high? I do not have anything I can think of in the sketch that acts differently based on whether the switch is high or low…
Here is what things look like when we experience the glitch:
Valve 78 looks normal, but it isn’t. After 54987 high samples, we got a low sample. We then enter the debounce period and after 3ms we get valve 79, with zero low values seen and 133 high values seen. This means that there was a single cycle low pulse at the end of valve 78 that made us think the switch had closed (pulled down to ground). After another 133+2717 high samples, we finally get the real low sample at valve 80. About 77{13079d06258ef9010cea88dee32f3cdfc6f216a54651010f7303ce6140ee927c} of the time, the glitch is a single low sample during an expected high section. About 23{13079d06258ef9010cea88dee32f3cdfc6f216a54651010f7303ce6140ee927c} are a single high sample during an expected low section. If I do two digitalReads in succession and see if they differ, I can create a trigger for my USB scope to capture these events.
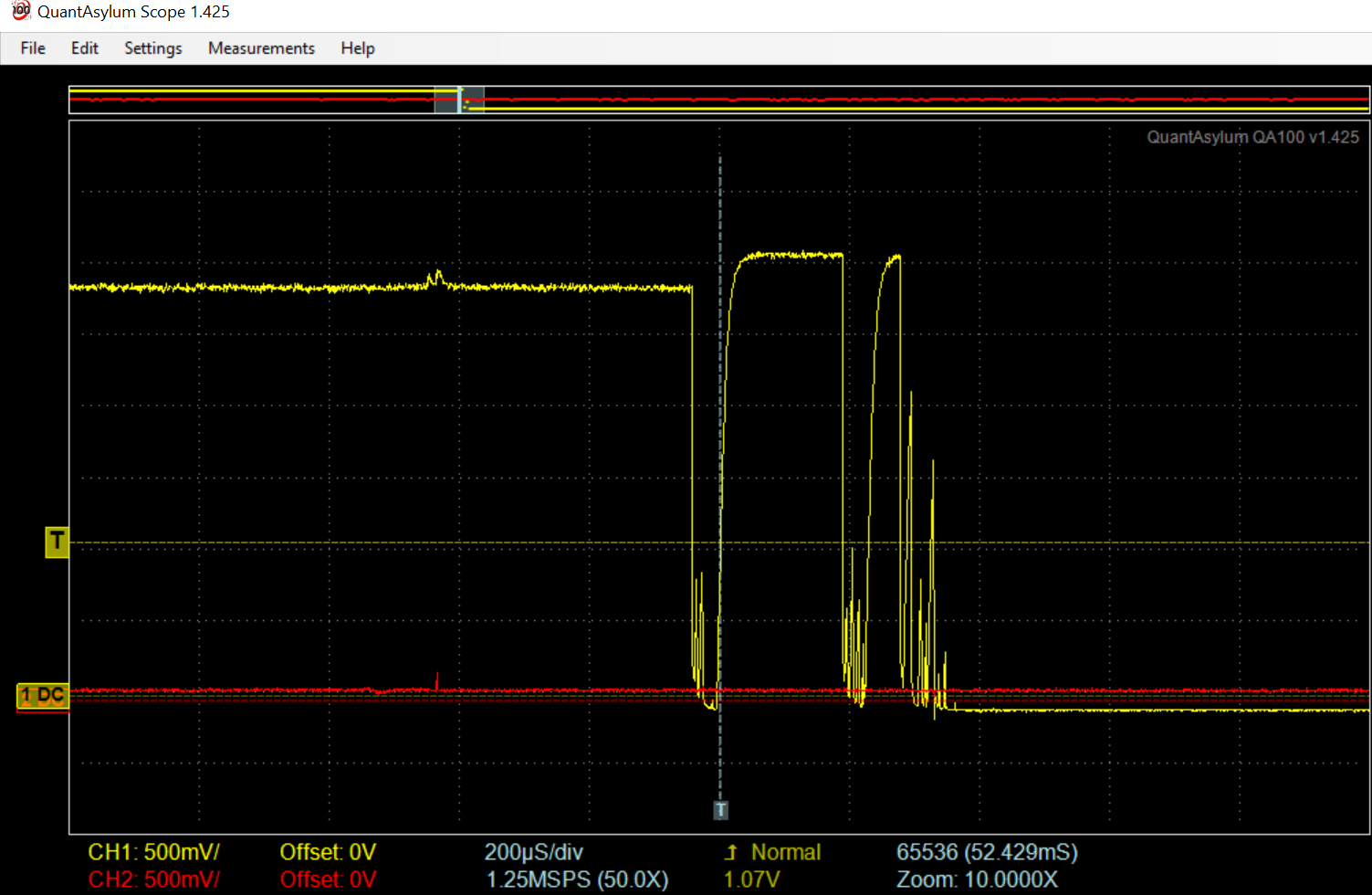
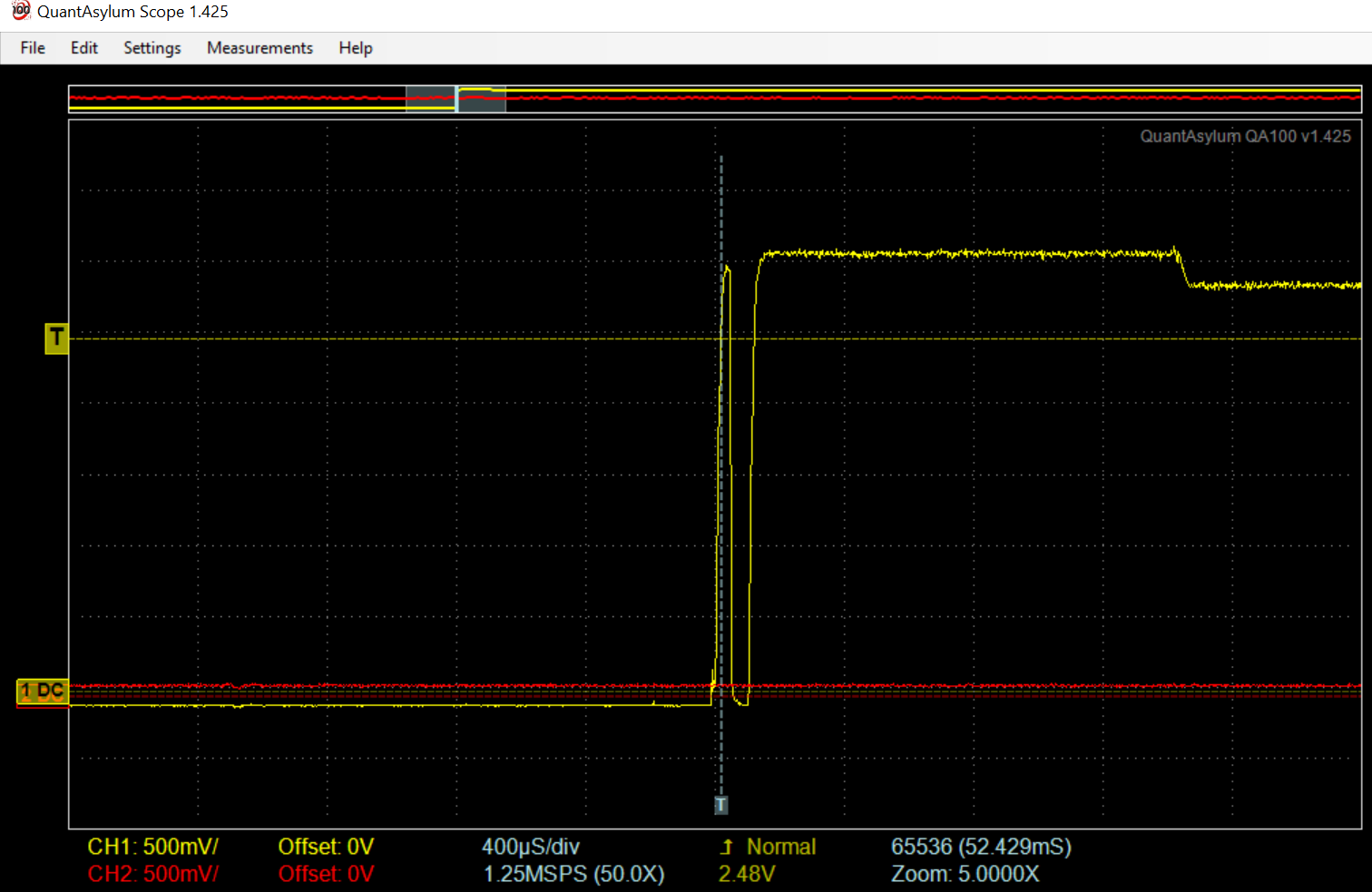
Typical switch bounce on High to Low. The yellow signal is the D14 pin on the header of the custom shield. The red signal is the debug signal. You cannot see it, but there is a very short spike on the red signal at the vertical dotted line marked “T” for trigger. In this case, we sampled the signal as the edge was rising and got low followed by high.
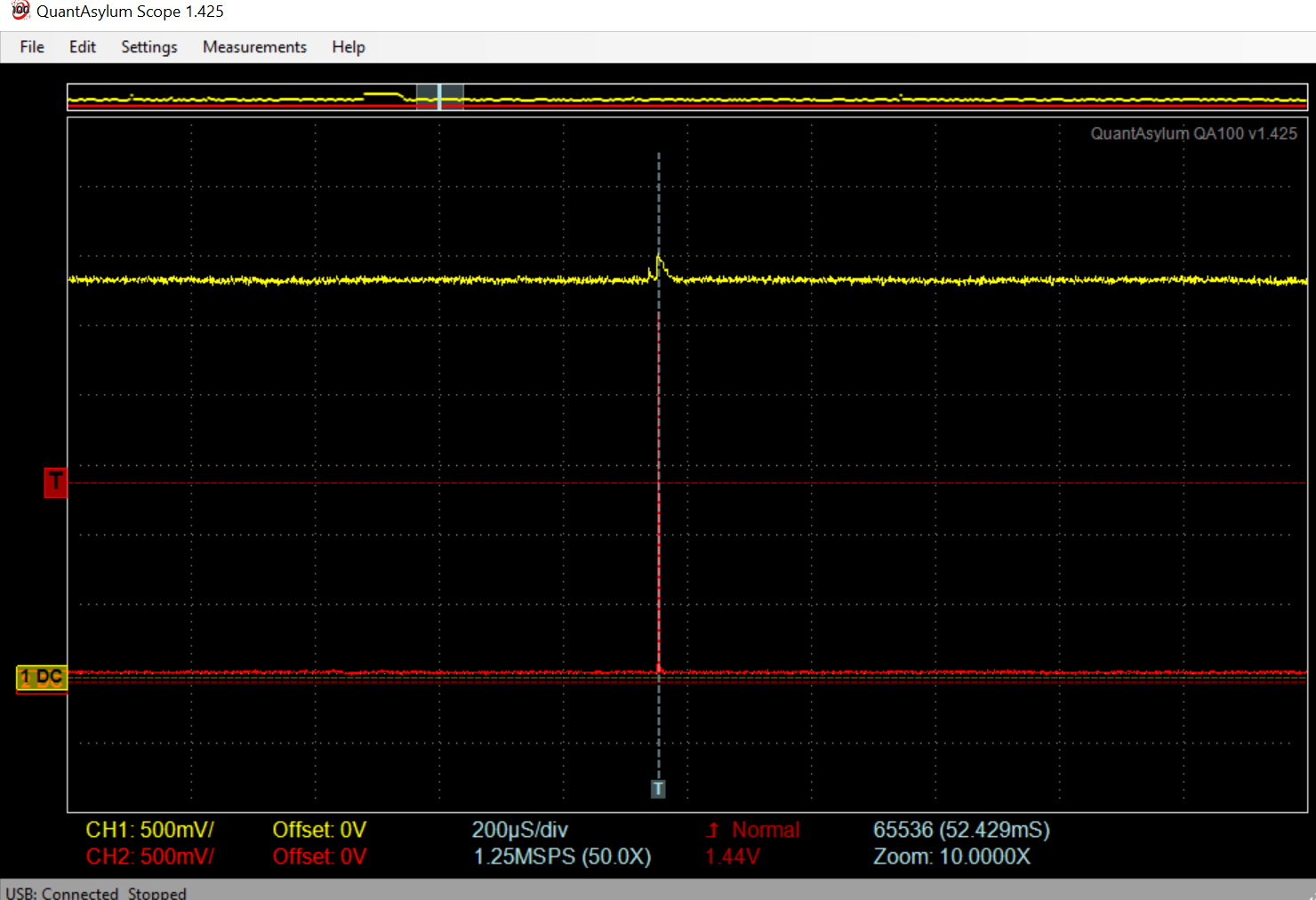
Unusual switch bounce on Low to High. Again, this was a sample of low followed by a sample of high. Not unexpected.
Q2: What is that wiggle in the signal toward the right edge here? The switch has opened, the internal pullup has worked, but then there is a drop of about 200mv.
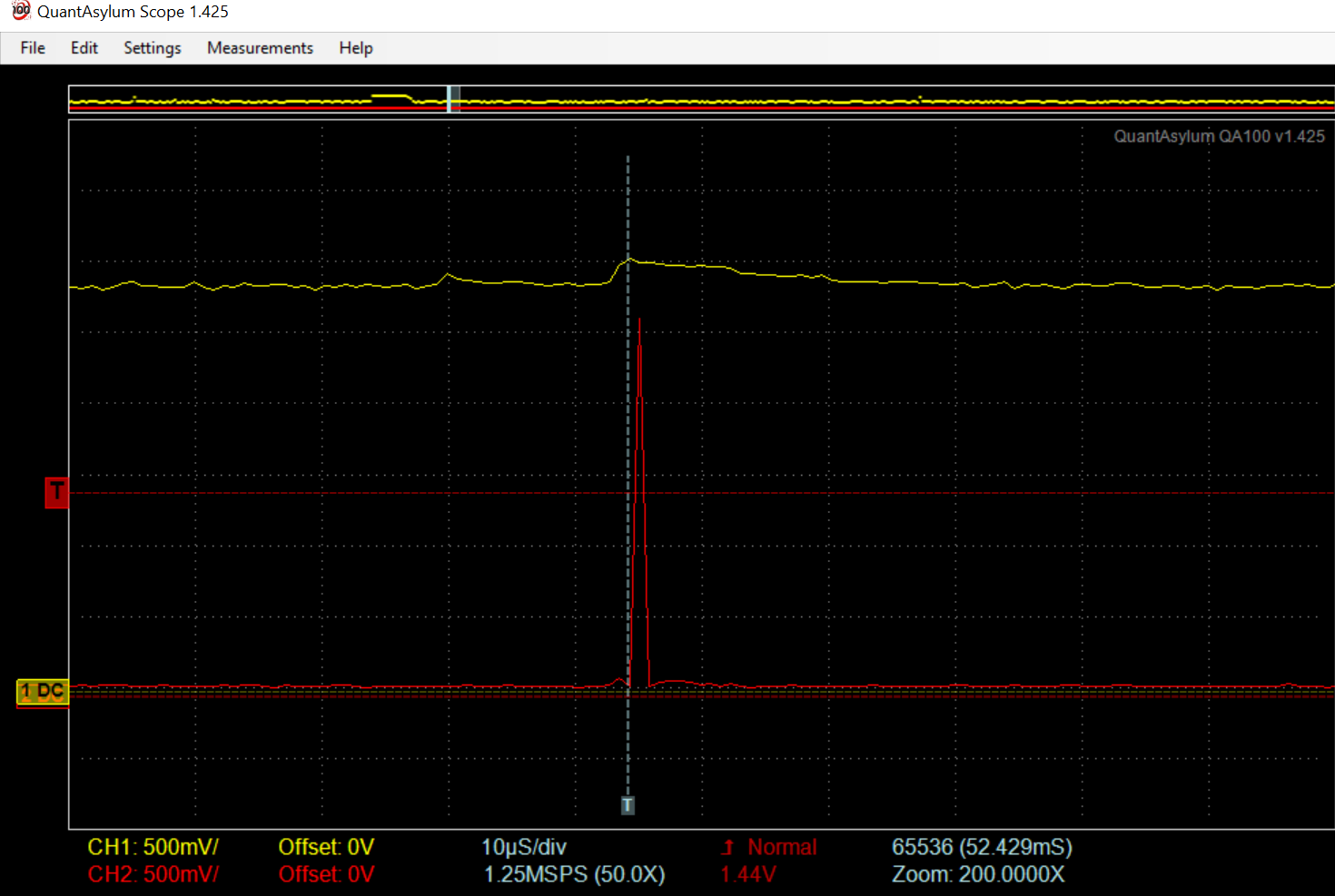
The Glitch. The red line pulses (saying we got different values from two successive digitalRead(14) calls. The yellow signal has a wiggle at the glitch, but there are other, much larger wiggles that do not exhibit the glitch. I show a zoomed in image as well. My scope is sampling at 1.25 MSPS.
Q3: What might be causing this? Is it interference from the DC motor? I have scoped the 3v power going to the motor (at the shield screw terminal) and it looks very clean.
Update 1 – May 24th
I tried replacing the D1 mini with another unit. The problem reproduces with the new unit. I unhooked the orange wire which goes from the screw terminal on the shield to the switch in the valve box. The problem reproduces. In other words, with nothing connected to the D14 pin, I still get occasional reads of LOW on that pin even though the pin is configured with the internal pullup enabled. I unhooked the white/orange unit from the shield and the problem still reproduces. All that remains connected to the shield is the battery (3V) and the motor.
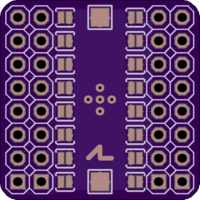
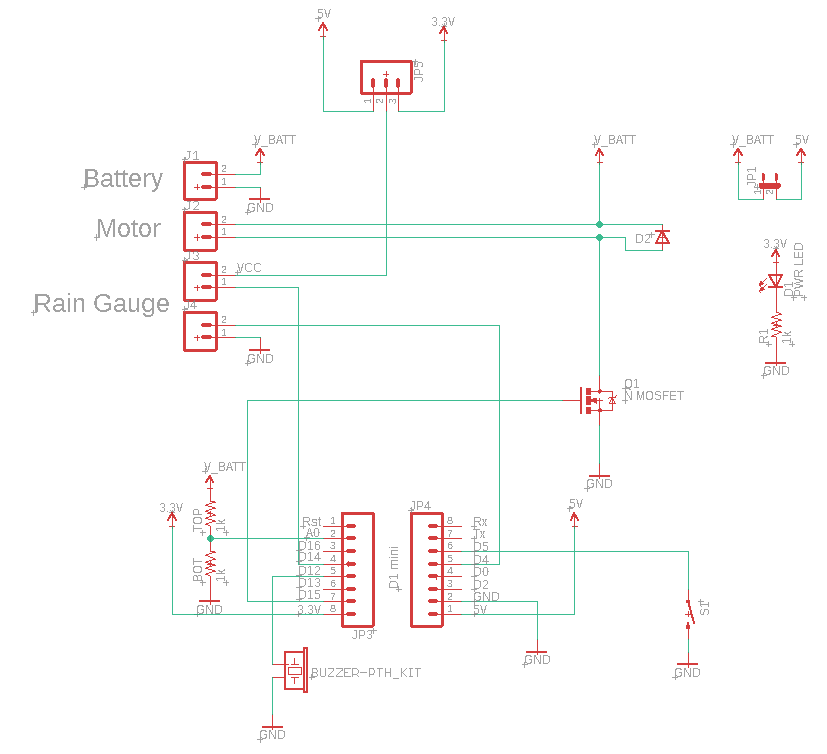
Here is a schematic of the MOSFET shield I designed.
Update 2 – May 24th
The glitch is present when the DC motor is connected across VBAT and GND (bypassing the MOSFET). The issue occurs when the MOSFET is gated or ungated. I have not observed the glitch when the DC motor is not running.
Update 3 – May 26th
Summary: The issue happens with multiple D1 boards and multiple pins. DC motor has to be on. MOSFET does not need to be gated or in the circuit of the motor. Switch does not need to be connected, but with it connected, we seem to get more glitches. I ran a test polling GPI (ESP8266_REG(0x318)) watching for spurious changes to as many INPUT_PULLUP signals as I could configure on the board.
Single sample glitch test (a – b – a – a – a) These pins were enabled as INPUT_PULLUP: Pin 0 (0001) is not routed on the shield (glitches seen) Pin 2 (0004) is not routed on the shield Pin 4 (0010) is routed on the shield to a screw terminal Pin 5 (0020) is routed on the shield to a switch (normally open) Pin 12 (1000) is routed on the shield to the buzzer (glitches seen) Pin 13 (2000) is not routed on the shield (valve switch connects here) Pin 14 (4000) is routed on the shield to a screw terminal